Description: Bubble Bot or Bubbly is a robot that detects objects in its surroundings by using 4 sonar sensors and moving towards them. Once an object is in front of the Bubble Bot, it will start its bubble motor and blows bubbles at the object. It blows bubbles for 5 seconds and then it stops blowing bubbles and continues to sense other objects in its vicinity.
Parts List
1. Arduino Uno
2. 4 x HC-SR04 ultrasonic sensor 3. 5 x TIP120 Transistors
4. 5 x 10KΩ
5. Connection Wires
6. Power bank and USB cord
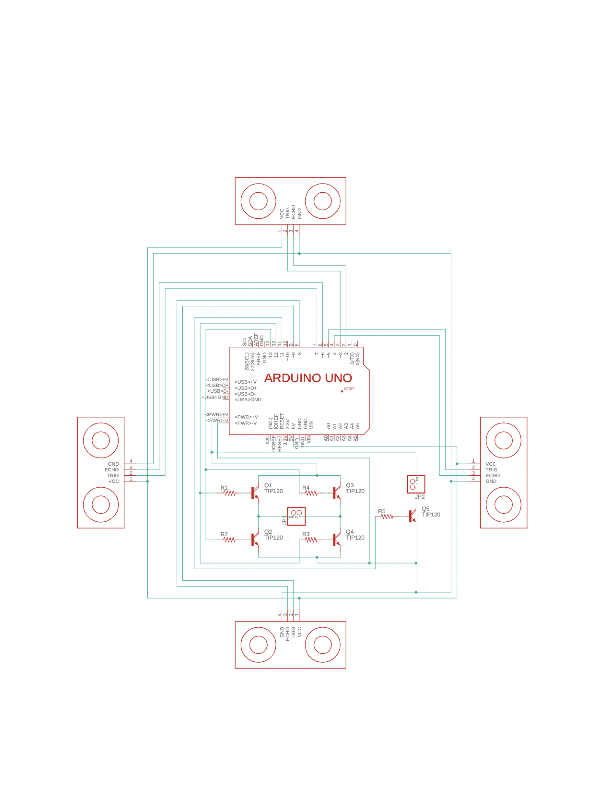
Circuit Diagram
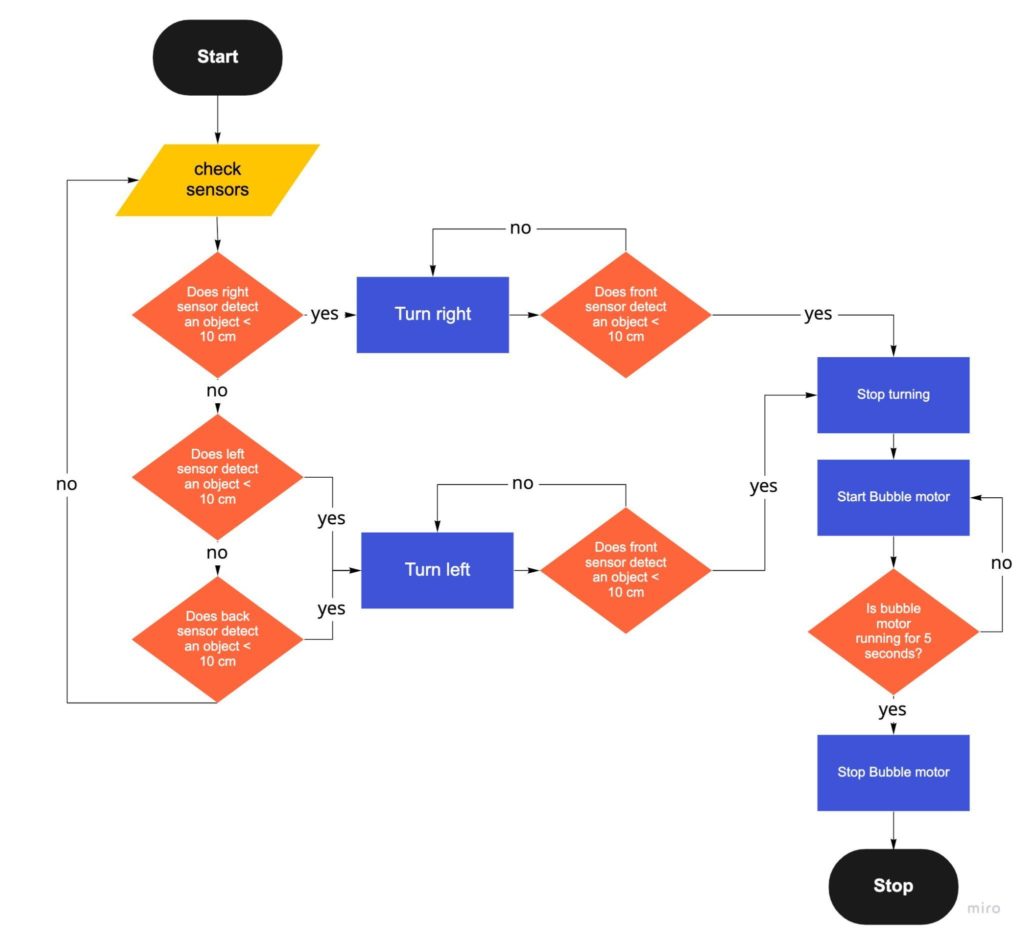
Flow Chart
Link to Code:
https://github.com/n00shinm/BubbleBot_Bubbly/blob/main/BubbleBot_Bub bly.ino
Video: https://youtu.be/zRmJ-d4Q2Y8
Next steps:
One of the challenges we faced at the presentation time for this project was to keep the bubble solution away from the electronic parts as the liquid container started to leak. We will need to create a leak-proof container for the bubble solution so that the bubble motor can sit on top of the moving platform. We will also look at stronger current to the DC motors so that they run better and smoother, for example, connecting 2x9V batteries in parallel and increasing the current to the motors. Additionally, to be able to reverse these DC motors, we created an H-bridge circuit with 4xTIP120 transistors that allowed for the reversing of the direction of the current in the motor. For the next version of this robot, we would use a high current motor driver such as L293DNE instead of transistors as they are designed to provide bidirectional higher currents.